
مورتي Morti هو كلب روبوت علَّم نفسه المشي، بعد ساعة واحدة فقط من خطوته الأولى. لقد تعلم تماماً مثل الحيوانات في البرِّية: عن طريق التعثر والسقوط حتى فهم كيف يحقق التوازن بالوقوف على أقدامه.
طوَّر باحثون من معهد ماكس بلانك للأنظمة الذكية Max Planck Institute for Intelligent Systems مورتي لمساعدة العلماء على دراسة كيف تتعلم الحيوانات المشي. مع مورتي يمكن للباحثين قياس القوى وعزم الدوران وقوة العضلات لكل طرف، وهو أمر سيكون من الصعب فعله مع كائن حي، كما قال فيليكس روبيرت Felix Ruppert، وهو طالب دكتوراه ومؤلف أول للدراسة الجديدة.
لبناء الروبوت، وهو بحجم كلب لابرادور، احتاج روبيرت والفريق في البدء إلى حوسبة الآلية التي يتعلم وفقها البشر والحيوانات المشي.
المشي، مثل طرفة العين والتنفس، هي مهام إيقاعية لأنها تستخدم حركات العضلات نفسها وتكررها طوال النشاط. لا تُنسق هذه المهام في الدماغ، ولكن تتحكم فيها شبكات من الخلايا العصبية، تسمى مجتمعة مولد النمط المركزي Central Pattern Generator (اختصاراً: الشبكة CPG). توجد الشبكة CPG الخاصة بنا للمشي في الحبل الشوكي Spinal cord وهو الذي يتحكم في تقلصات العضلات في أرجلنا التي تدفعنا إلى الأمام، خطوة واحدة في كل مرة. عندما نتعثر أو نسقط على أرض وعرة، فإننا لا نتوقف عن المشي على الفور. وذلك لأن الشبكة CPG الشوكية يمكنها التحكم في ردود أفعال أرجلنا دونما الحاجة إلى مراجعة الدماغ لمعرفة كيف ينبغي المضي قدماً. لذلك كان لا بد من تزويد مورتي بخوارزمية تعمل مثل النخاع الشوكي.
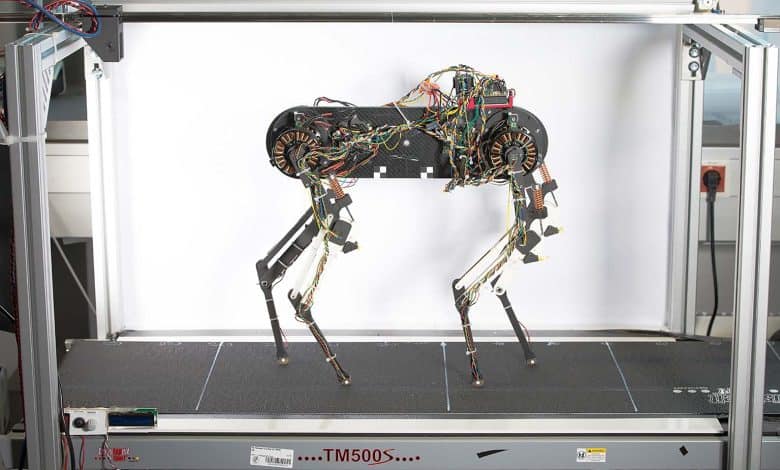
بعد تركيب الشبكة CPG الأساسية في مكانها، وُضع مورتي على جهاز المشي. في هذه المرحلة، لم يكن لدى مورتي أي فكرة كيف يمشي، ولم يكن لديه أي طريقة لمعرفة ما المساحة التي يقف عليها أو إلى أي مدى يجب أن تمتد إحدى قوائمه قبل أن يُنزلها ليرفع الأخرى. كانت أقدامه غير متسقة مثل شخصية الغزال بامبي المولود حديثاً في فيلم الرسوم الكرتونية.
قال روبيرت: “يُنتج الحاسوب إشارات تتحكم في محركات الأرجل، والروبوت يمشي ويتعثر في البداية. تتدفق البيانات عائدة من المستشعرات Sensors [في قوائم الروبوت] إلى الحبل الشوكي الافتراضي حيث تُقارن بيانات المستشعر مع بيانات الشبكة CPG. إذا كانت بيانات المستشعر لا تتطابق مع البيانات المتوقعة، فإن خوارزمية التعلم تغير سلوك المشي حتى يمشي الروبوت على النحو الصحيح، ومن دون أن يتعثر”.
مورتي أكفأ بالمقارنة مع روبوتات المشي الأخرى التي تتطلب أنظمة تحكم معقدة وكمية من الطاقة من عدة مئات وات، فهو يحتاج فقط إلى خمسة وات للتشغيل. إضافةً إلى تطوير الروبوتيات في قطاع الصناعة، يمكن لمورتي المساعدة على الإجابة عن عديد من الأسئلة التي يطرحها الباحثون حول حركة الحيوانات.
تساءل روبيرت: “ما الذي يدفع إلى تعلُّم المشي؟ ما أفضل وضع للعضلات؟ وما يجب أن يكون عليه طول الأقدام وأجزائها؟ وعلى نطاق أوسع لماذا الحيوانات جيدة جداً في الحركة [على الرغم من] كل التأخيرات العصبية التي تعانيها – ولماذا لم نتمكن من إعادة إنتاج هذا الأداء في روبوتاتنا؟”.
وأضاف: “إن الروبوتات المستوحاة من الحياة [مثل مورتي] هي أداة رائعة لفهم الميكانيكا الحيوية وأسئلتها التي لم نجد إجابة عنها”.




